ロボットアーム(4サーボ×2)制御ツールAibouMaker2_LoboServoController v1.0.0
- ダウンロード商品¥ 1,000
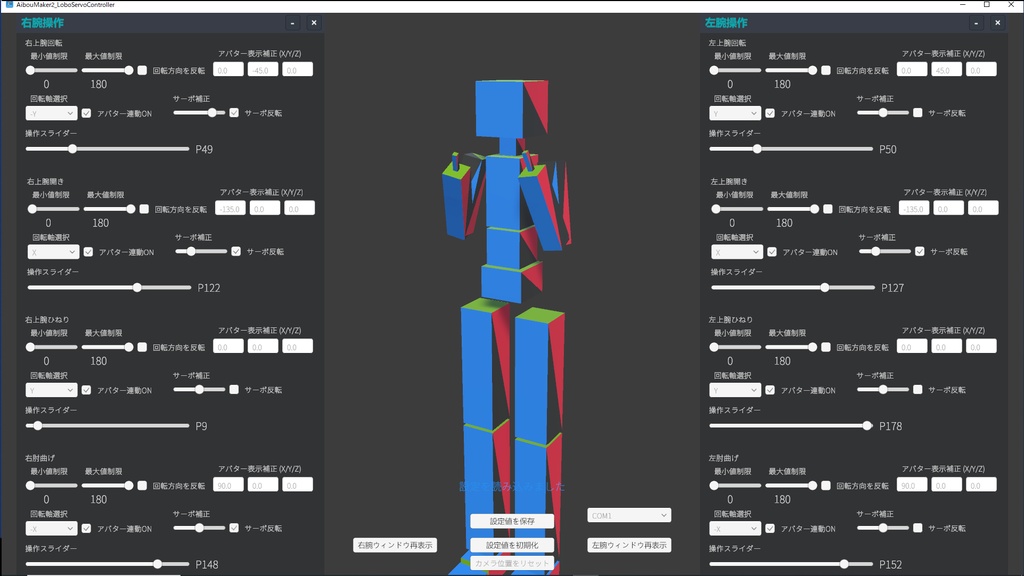

ロボット製作を手軽に始めよう! このアプリはArduinoと連携して「両腕(右腕+左腕)」のサーボを最大8個まで同時制御できるツールです。 ロボット実機と、Unity上に表示される箱型アバターを連動させ、 スライダー操作によりサーボとアバターの動きをリアルタイムで同期表示します。 本バージョンは安定動作が確認された正式版であり、 サーボ調整・補正・保存がすべてUI上で完結するように設計されています。 ※ Arduinoスケッチは同梱していません(無料版に付属)
■ 主な機能
・ 最大8サーボ対応(両腕制御) ・ サーボポート選択(COMポート) ・ 通信速度設定(115200bps) ・スライダーによる角度調整 ・箱アバターとのリアルタイム連動表示 ・サーボ個別の: - 送信角度補正(オフセット) - 回転方向反転 - 最小/最大角度制限 ・表示用のXYZ回転補正 ・ 設定ファイルによる自動保存/読み込み(JSON形式)
■ 使用方法
1. AibouMaker2_LoboServoController.exe を起動 2. COMポートを選択(USB接続されたArduinoなど) 3. スライダーを使って両腕の各サーボを操作 4. 補正、回転方向、角度制限などを調整 5. 保存ボタンで現在の設定を保存(起動時に自動読込されます)
■ 注意事項
・ 起動時にポート未接続、または無効なCOMポートが選ばれていると サーボとアバターの動きが一致しないことがあります。 一度スライダーを動かすと強制的に同期されます。 ・ 実機サーボの物理制限を超える角度を送信しないよう注意してください。 ・サーボへの給電はArduinoからではなく、必ず**外部電源**を使用してください。
■ 設定ファイルについて
- ファイル名:ServoConfig_Lobo8.json - 保存場所:ユーザーローカル 例:C:\Users\<ユーザー名>\AppData\LocalLow\ST_HAZAMA714\AibouMaker2_LoboServoController\ ・内容:各サーボの設定(オフセット・反転・回転軸・角度制限など) ・アプリ起動時に自動生成され、保存・読み込みは自動で行われます ※ Windowsの「ファイル名を指定して実行」で `%appdata%` → `../LocalLow/...` にアクセス可能
■ Arduinoスケッチについて
・本製品には Arduino用スケッチは付属していません ・無料版(片腕サーボ制御ツール)に動作確認済みスケッチが同梱されています ・Arduino側は「#0 P90」などの形式で送られる角度コマンドを解釈・実行する必要があります ・使用ボード例:Arduino Uno、Nano、ATmega328P搭載機など ・通信速度:115200bps(アプリと一致させてください)
■ ライセンスとクレジット
・Unity © Unity Technologies ・使用フォントやUI素材はフリーライセンス(詳細は別途) ・本アプリは Studio Hazama による独自開発です
■ 開発・提供元
Studio Hazama714 / 介塚はざま 不具合報告やご意見はBOOTHメッセージ、またはX(@st_hazama714)まで