
【お手軽NPC】Udonで飛ぶ!うさぎドローン
- うさぎの置物(Udon・電源ユニットなど無しバージョン)Digital0 JPY
- 通常版Digital100 JPY






UdonGraphで飛ぶうさぎのドローンです! 物理演算のおかげでコライダーのある所ならどこでもふわふわ! ⏬このワールドでご体験いただけます! https://vrchat.com/home/world/wrld_4d3bffbc-ccfe-4e99-9b80-9869e2f277bf
◆内容◆
●Unitypackage
◆仕様◆
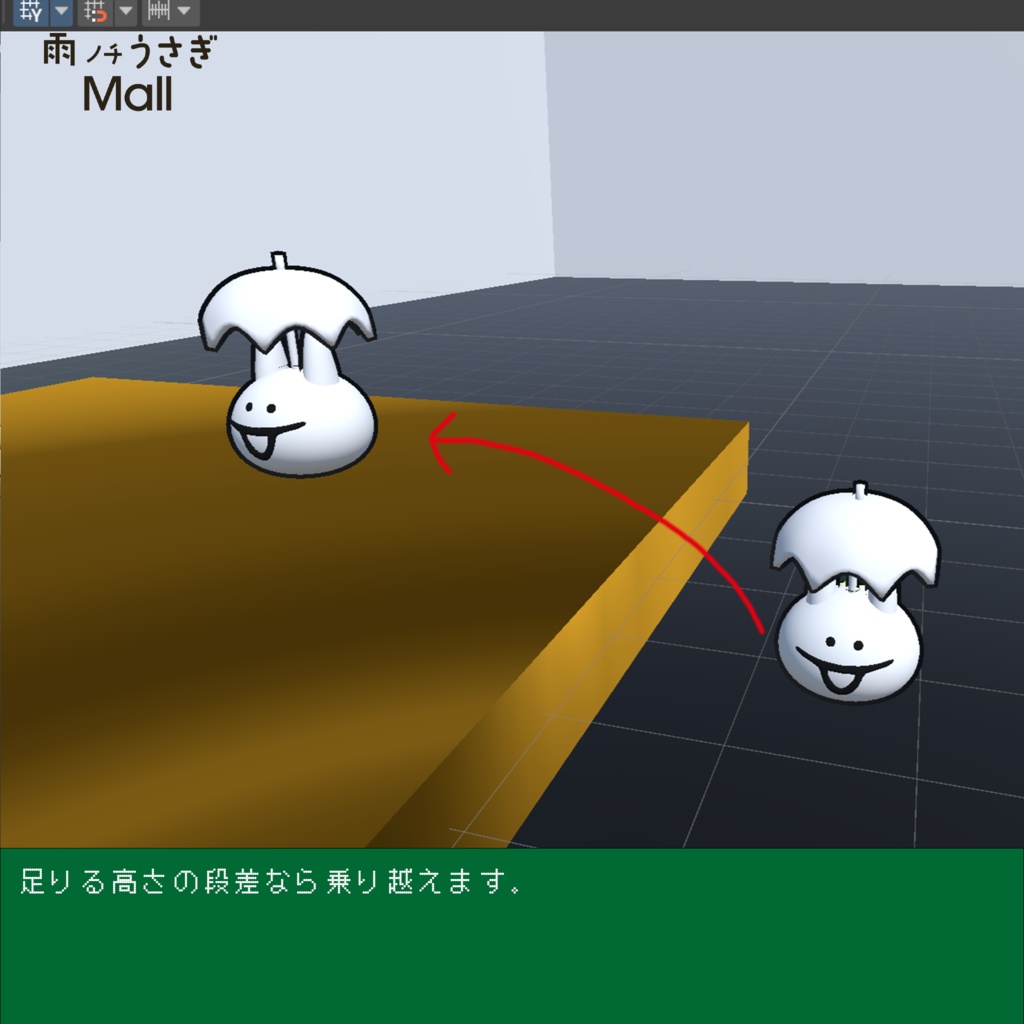
●SDK3での使用を想定しています。 ●本体下に向かって出るセンサーがコライダーに反応することで高さを維持します。自動的に壁から離れる機能や、崖を避ける機能はありませんので、脱走しないためのコライダーもご用意ください。
◆Udon設定項目◆
初期値はサンプルワールドで飛んでいるものと同じ値に設定されています。 下記の※付き項目は設定した範囲内で定期的にランダムな値に更新されます。 ※powermin:最大風力 ※powermax:最小風力 ※xrotrange:移動するためのx軸中心の回転力の範囲 (x:最小値,y:最大値) ※yrotrange:向きを変えるためのy軸中心の回転力の範囲 (x:最小値,y:最大値) ※zrotrange:移動するためのz軸中心の回転力の範囲 (x:最小値,y:最大値) spanrange:上記の※付き項目を更新する間隔(ランダム)の範囲 anglepower:自身が傾くほど風力を大きくする上で、その値を累乗する数 (大きくすると傾いた際に急激に加速します) anglecontrol:姿勢保持回転力の大きさ anglepower2:anglepowerで累乗した数の大きさ (大きくすると傾きによる風力が大きくなります) onoff:最初に電源がONかOFFか controlpowermax:センサーが感知した地面との距離に応じて大きくなる風力の最大値 anglepowermax:自身の傾きに応じて大きくなる風力の最大値 groundreaction:センサーが感知した地面との距離に応じて風力を大きくする上で、その値を累乗する数 (大きくすると地面に近づいた際に急激に風力が大きくなります) ⏬️この中には対応するコンポーネントが入ります(最初から入っています) rb:制御するオブジェクトのリジッドボディ PowerLampON:電源ランプON時マテリアル: PowerLampOFF:電源ランプOFF時マテリアル: PowerLampMeshRenderer:電源ランプのマテリアルを含むオブジェクトのメッシュレンダラー
◆利用規約◆
本規約は、あしやまひろこ(@hiorko_TB)氏が作成したVN3ライセンス( https://www.vn3.org/ )のテンプレートを使用しています。 https://drive.google.com/file/d/1eweaPLiNqqhFrEzPODl9UuTB6Y90S4Bb/view?usp=drive_link